
2025年4月22日,由立陶宛维尔纽斯大学(Vilnius University)牵头的跨学科研究团队近日在《Nature
Reviews》期刊上发表了首篇关于多光子3D光刻(MP3DL)的综合性技术指南。这项工作由该校物理学院激光研究中心(Laser
Research Center, LRC)协调组织,合作团队涵盖来自美国、德国以及日本的专家学者。

MP3DL的核心原理基于多光子吸收诱导的局部光化学反应,通常通过超快激光脉冲实现。这一机制可实现极高的能量空间约束,从而实现纳米级精度的材料交联。据研究人员指出,该技术可用于构建特征尺寸小于100纳米的复杂三维自由曲面结构,广泛应用于纳米光子学、生物医学支架、微光学器件等高端领域。

该技术指南详细介绍了MP3DL的实验实现方法,涵盖振镜扫描系统、压电平台以及高数值孔径(NA)显微透镜的协同作用。文中重点探讨了体素(voxel)控制策略、负性光刻胶的曝光阈值特性,以及材料在高强度飞秒激光照射下的非线性响应行为。这类精密控制机制使得研究人员能够在不引发热损伤的情况下,高效地制造出复杂的微纳结构。
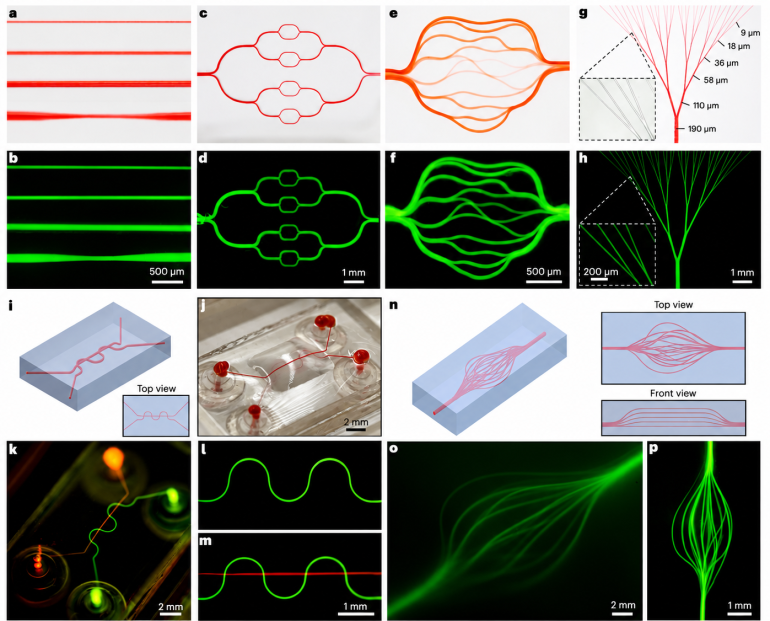
Mangirdas Malinauskas教授指出:“我们从一开始就具有独创性,因为我们使用的是发射绿光的立陶宛激光器,而大多数其它研究人员使用的是红外激光器。研究团队对波长的选择需要不同的工艺参数,并帮助建立了现在在入门书中记录的替代制造方案。”

解决可重复性和方法论碎片化问题
在此出版物发布之前,MP3DL研究领域各自为政,各实验室和供应商通常采用不同的假设、校准方法及术语。而这本指南通过明确解释关键参数、概述可重复性标准并统一术语,为这个领域带来了所需的一致性。Malinauskas教授补充道:“我们的这本入门书是多光子3D光刻领域的开创之作。它系统地阐述了这项技术背后的所有原理,并揭示了许多原创研究论文中经常被忽视的重要细节。”文章中区分了相同设备内以及不同仪器之间的可重复性问题。另外,指南中还提供了针对环境温度与湿度控制、激光输出稳定性表征,以及如何在样品制备过程中避免显影阶段产生毛细管应力的详细指导。此外,文中还记录了如何利用临界点干燥技术与低表面张力溶剂的使用,以解决通常影响高纵横比纳米结构的失效模式。

光学、微流体和机器人领域的记录应用
指南中描述的制造性能包括使用先进的扫描配置,实现在22纳米线宽下的打印精度,并且具备每秒高达1.48×10⁸ 体素的吞吐量。报告中提到的应用领域涵盖了光子晶体、光学超材料、折射与衍射微光学器件、用于生物医学输送的微型机器人以及功能化微流体系统。相关研究还探讨了材料在可编程刚度、低自发荧光和生物活性表面化学方面的兼容性,这些特性对于开发光学传感器和细胞相互作用基质至关重要。

MP3DL已纳入维尔纽斯大学所有学位课程,学生可参与基于实验室的制造与性能分析课程,进一步推动立陶宛在光子学与增材制造领域的专业发展。当前研究聚焦于曝光协议优化、自适应体素调整及自动参数选择。未来将结合机器学习,实现打印参数的实时调控,并提升对新型混合光刻胶的适配能力。
最后,这项研究还评估了当前技术的局限性,包括分辨率与吞吐量之间的权衡、材料特异性限制,以及大规模制造中可能出现的拼接误差。



0 留言