
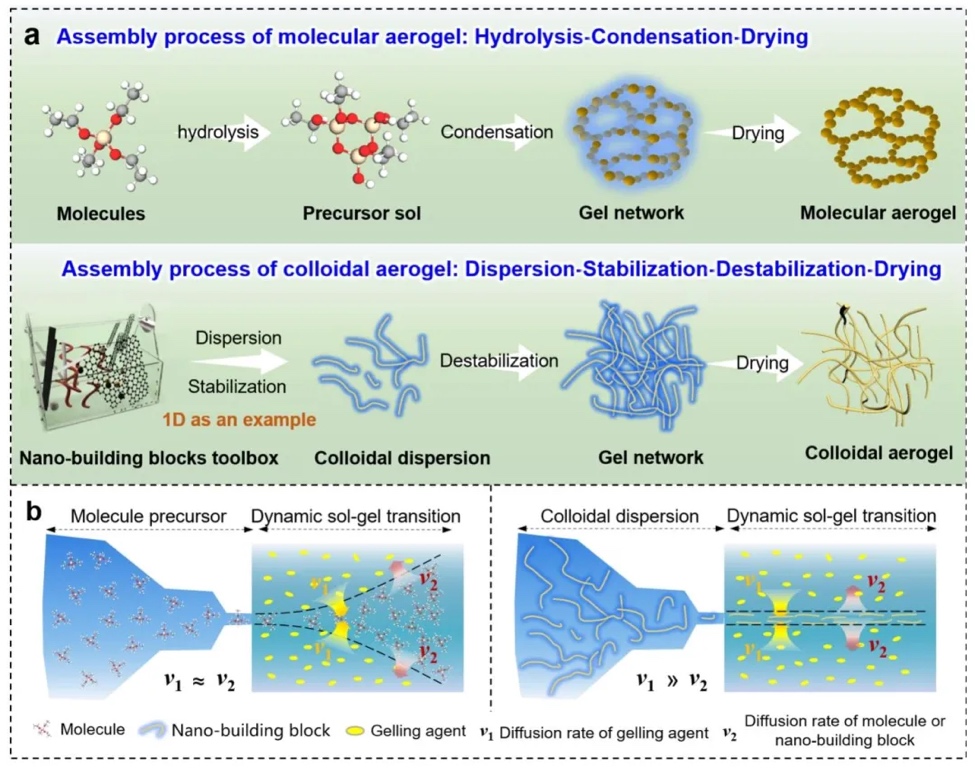
气凝胶作为一类在多学科领域具有关键作用的多孔纳米材料,因其独特的结构和优异的性能,在众多领域得到了广泛的应用。然而,目前对于3D打印气凝胶的系统性综述尚处于起步阶段,尤其是在区分胶体气凝胶和分子气凝胶方面存在不足,且缺乏从胶体科学角度对3D打印胶体气凝胶进行的深入探讨。
来自中国科学院苏州纳米技术与纳米仿生研究所张学同团队,综述了3D打印胶体气凝胶这一研究领域的进展。团队从胶体科学的视角出发,深入探讨了3D打印胶体气凝胶的发展历程、关键制备步骤、打印策略、分类、限域功能化、独特性能、新兴应用,以及当前面临的挑战和未来机遇。特别对打印过程中的热力学/动力学、溶胶/溶胶
-
凝胶/凝胶打印策略和限域功能化进行了详细阐述。团队提出通过开发新的打印技术、优化墨水配方、改进打印设备等措施,有望解决当前3D打印胶体气凝胶面临的如打印速度慢、多组分打印困难等问题,为该领域的发展提供了新的思路和方向。相关工作以“3D
printed colloidal aerogels: Principle, process, performance, and
perspective”为题发表在《Progress in Materials Science》上。
中国科学院苏州纳米所程青青副研究员为论文第一作者,张学同研究员为论文通讯作者。

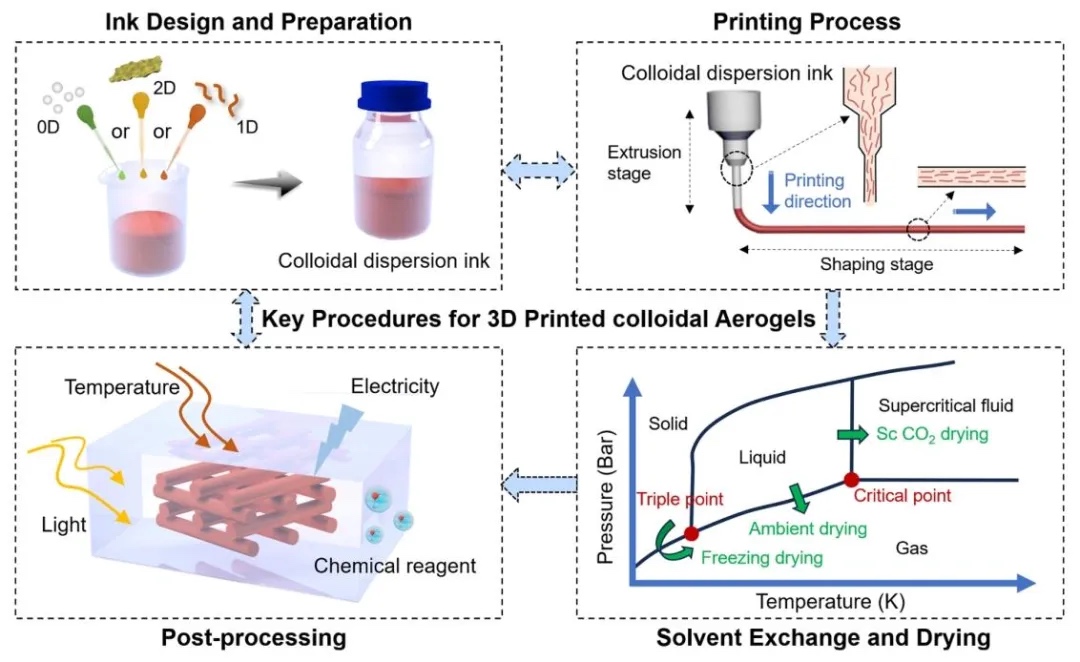
1. 3D打印胶体气凝胶的制备
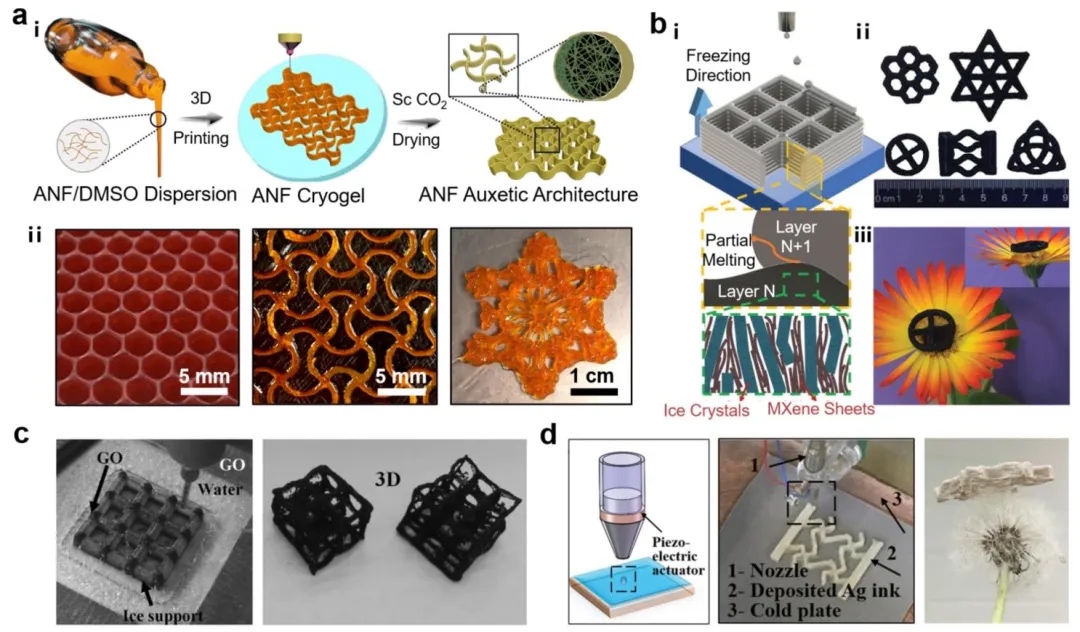
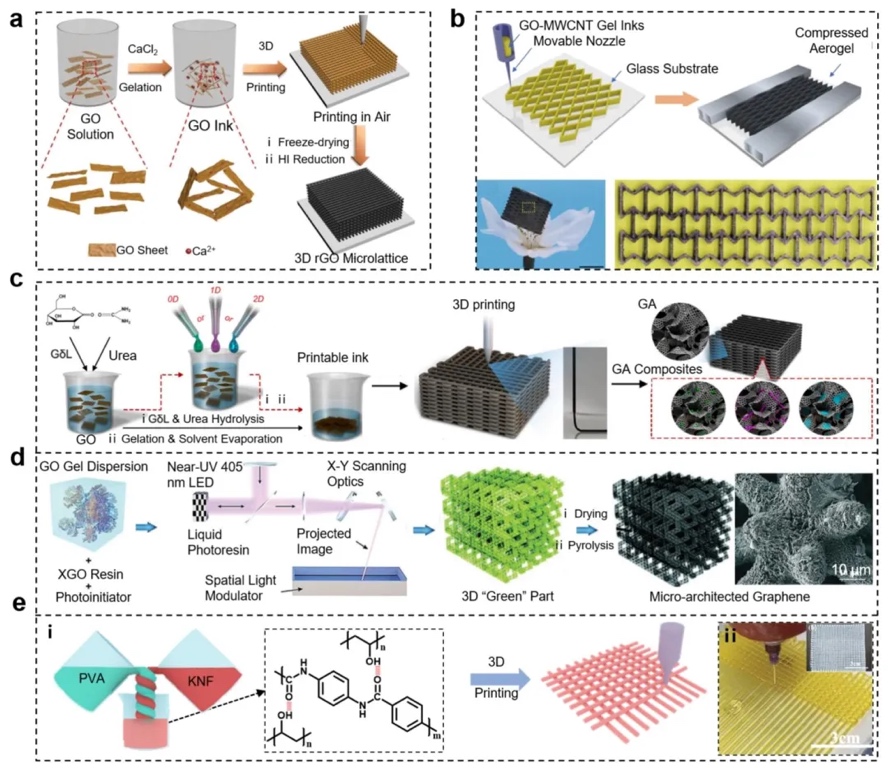
- 制备流程:通过实验研究和流程分析,明确3D打印胶体气凝胶的制备包含墨水设计与制备、打印过程、溶剂交换和干燥以及后处理等关键步骤。墨水需考虑纳米构建块种类等因素;打印有喷墨、挤出、光固化等方式;干燥方法影响气凝胶结构;后处理可优化气凝胶性能。
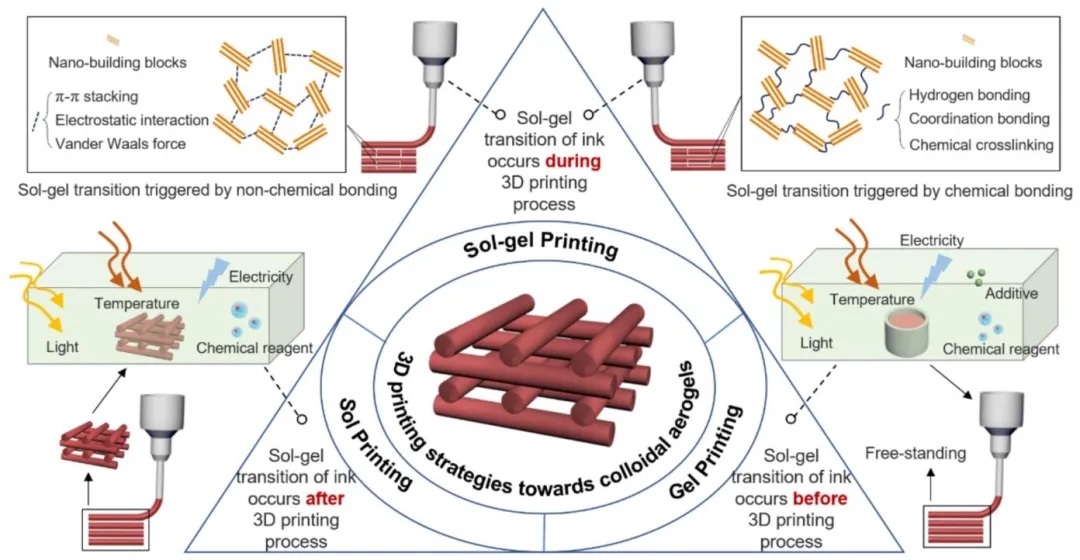
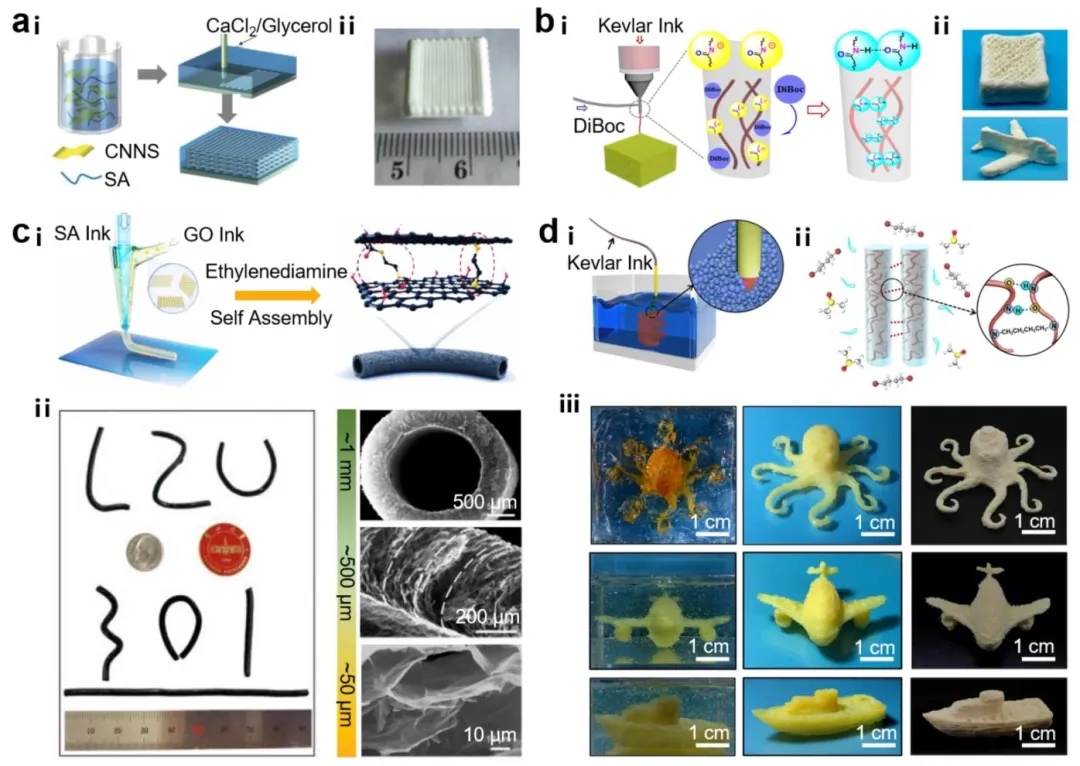
- 打印策略:采用分类讨论和实例分析方法,根据溶胶 - 凝胶转变时间,将打印策略分为溶胶打印、溶胶 -
凝胶打印和凝胶打印。溶胶打印在打印后发生转变,适用于多种材料;溶胶 -
凝胶打印在打印过程中转变,分物理和化学两种方式,可实现复杂结构打印;凝胶打印在打印前完成转变,能利用现有凝胶体系。
2. 3D打印胶体气凝胶的性能研究
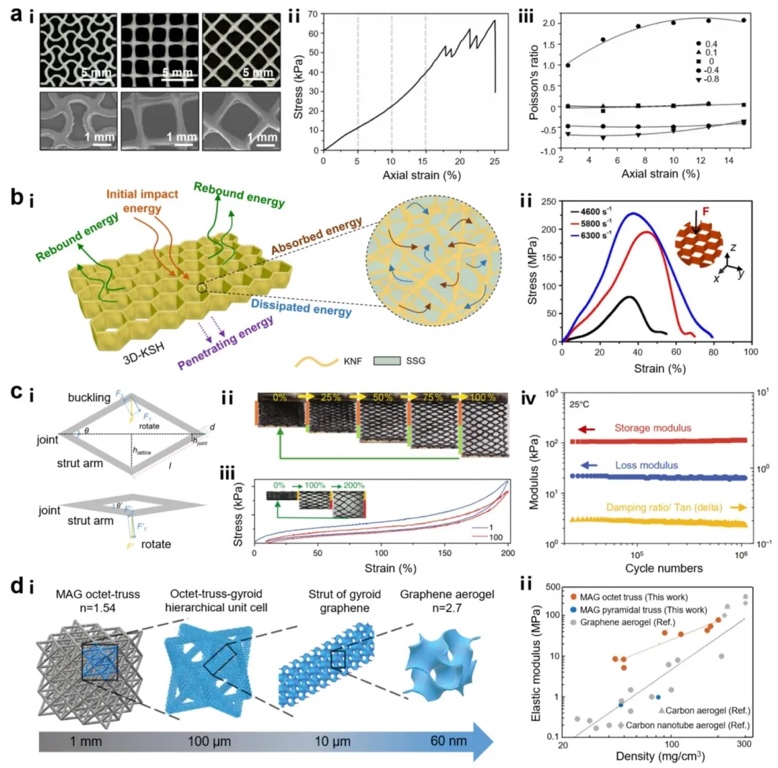
- 机械性能:以Kevlar、石墨烯/CNT等胶体气凝胶为研究对象,通过力学测试和结构分析,发现可通过设计气凝胶的层次结构调控其机械性能。如Kevlar胶体气凝胶可获得负泊松比,石墨烯/CNT胶体气凝胶能实现高拉伸比和高疲劳抗性。
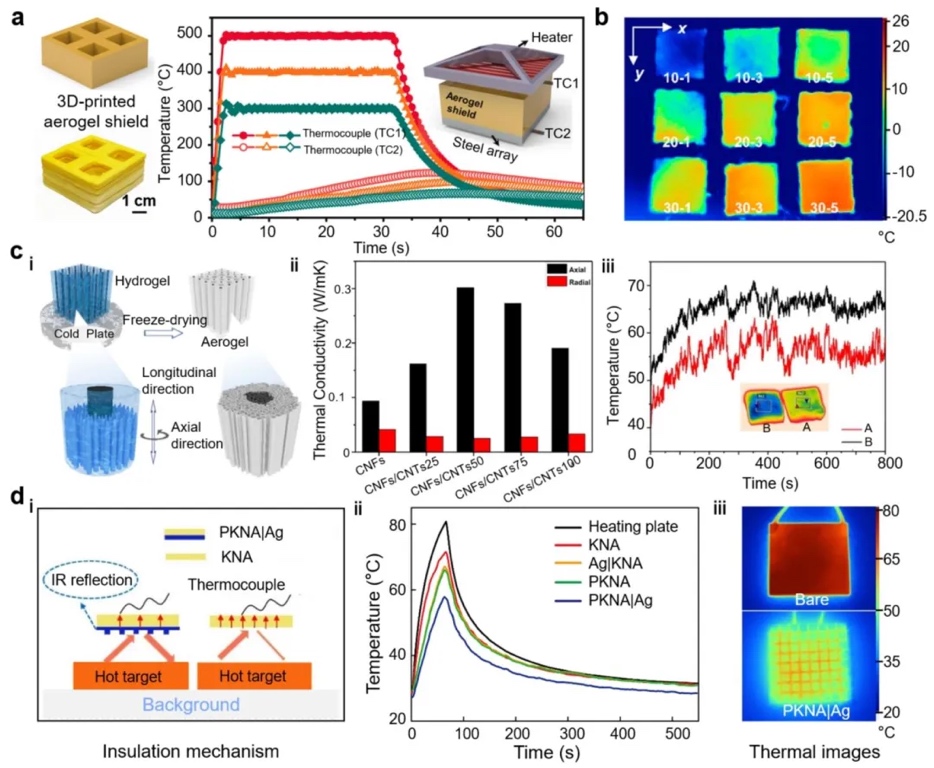
- 热性能:运用热性能测试和结构调控实验,研究发现3D打印胶体气凝胶具有优异的隔热性能,热导率受结构影响,可通过控制打印参数调节热传导。如3D打印的聚酰亚胺 - 二氧化硅胶体气凝胶屏蔽和Kevlar胶体气凝胶能有效阻挡热量传递。
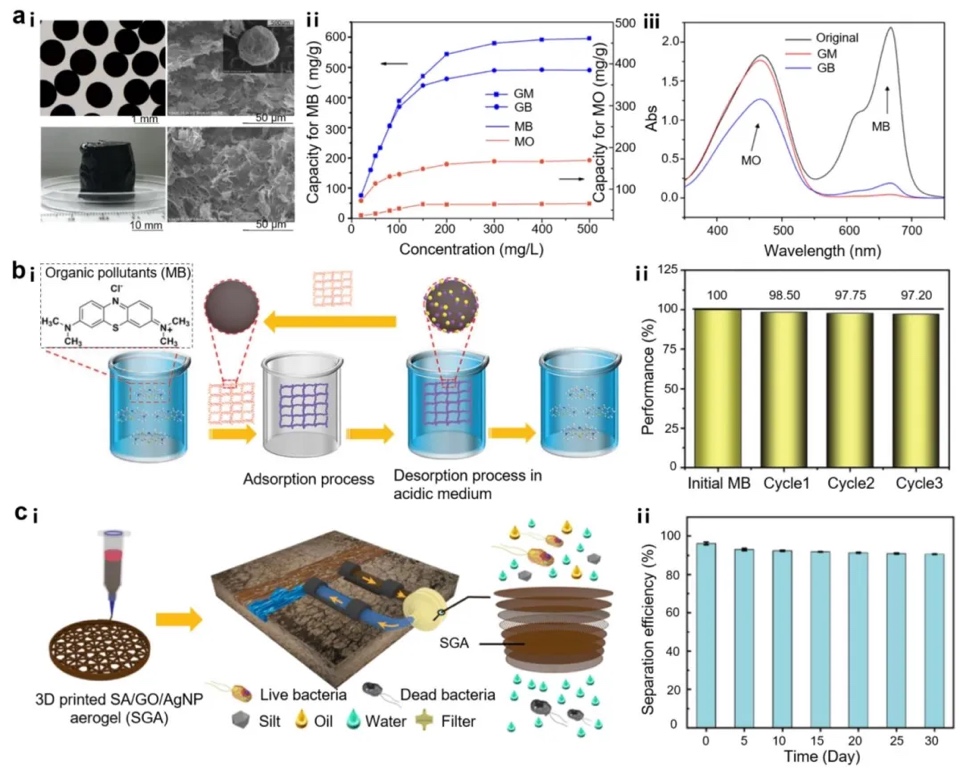
- 吸附性能:利用吸附实验和吸附模型分析,研究3D打印胶体气凝胶对多种物质的吸附能力和吸附机制。结果表明其对染料、有机污染物等有良好吸附能力,如3D打印的石墨烯微球对亚甲基蓝的吸附性能优异。
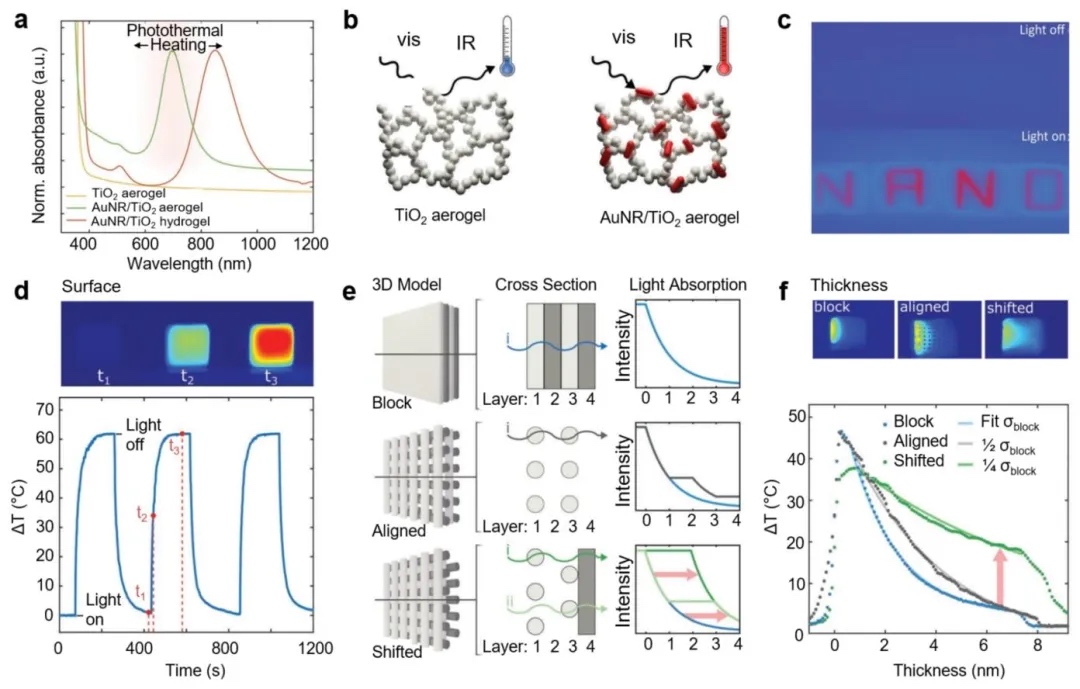
- 光学性能:通过光学测试和结构表征,研究光与气凝胶的相互作用。发现气凝胶的光学性能与纳米构建块大小、结构有关,可通过调整结构调控光的吸收、散射和透射。如3D打印的Au - 纳米棒TiO2胶体气凝胶在可见 - 近红外范围内有强消光特性。
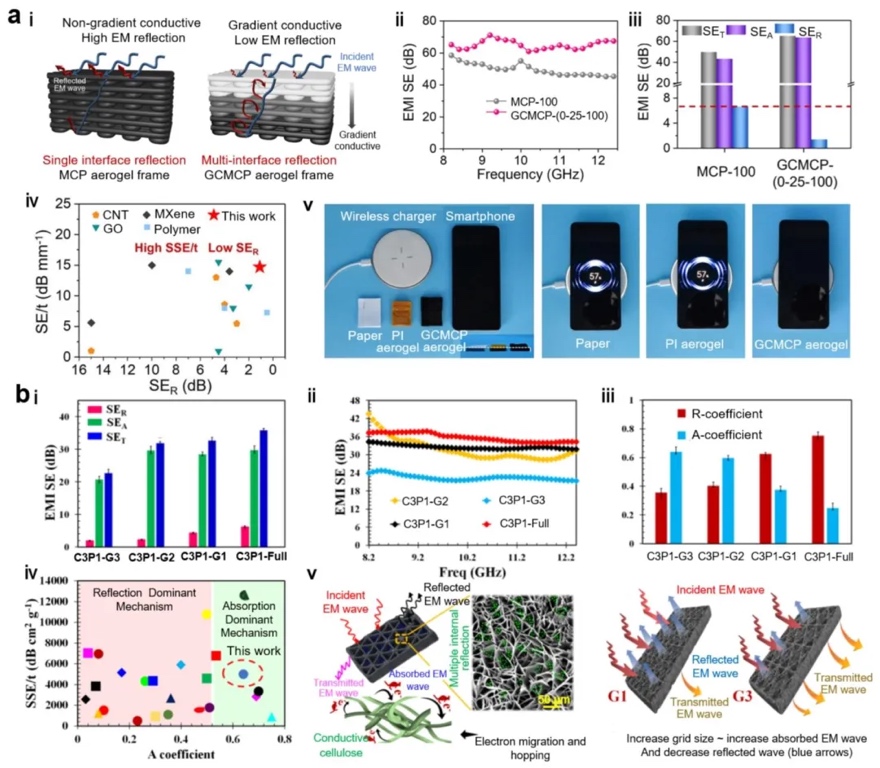
- 电磁屏蔽性能:分析3D打印胶体气凝胶对电磁波的反射、吸收和多次内部反射损耗机制,研究发现通过结构设计和材料选择可提高电磁屏蔽效率。如3D打印的过渡金属碳化物/碳纳米管/聚酰亚胺(GCMCP)胶体气凝胶具有良好的电磁屏蔽性能。
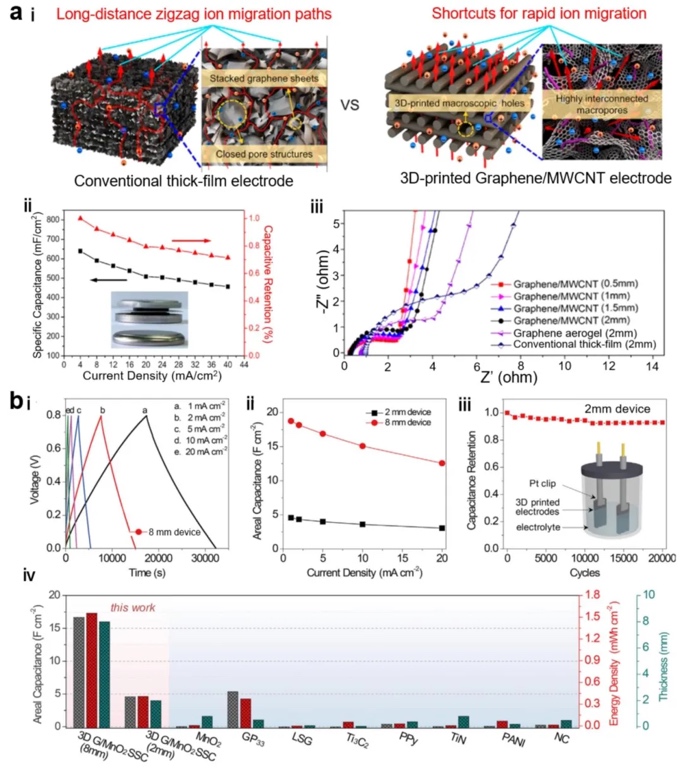
- 电化学性能:研究3D打印胶体气凝胶在电池、超级电容器等电化学器件中的应用,如离子传输、电容特性等。发现其在电化学器件中具有优势,如3D打印的石墨烯/MWCNT电极能加速离子/电荷传输。
3. 3D打印胶体气凝胶的应用探索
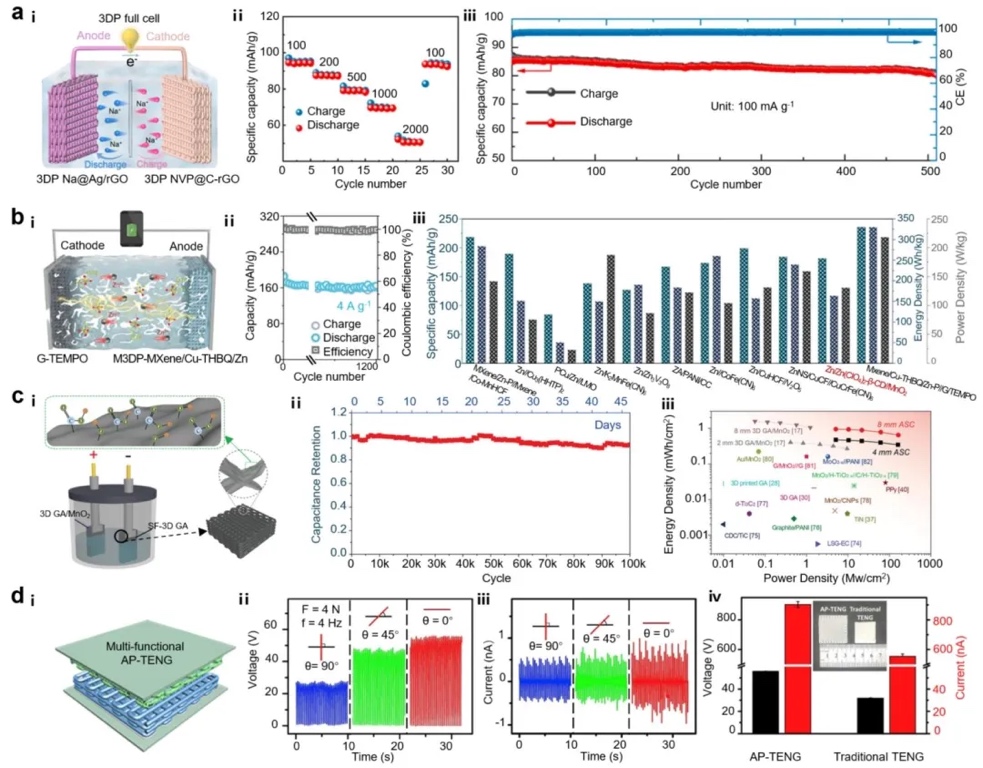
- 能源存储:通过实例展示和性能分析,研究发现3D打印胶体气凝胶可用于组装多种电化学器件,如钠金属电池、锌离子电池、超级电容器和摩擦纳米发电机等,能提高能源存储和转换效率。
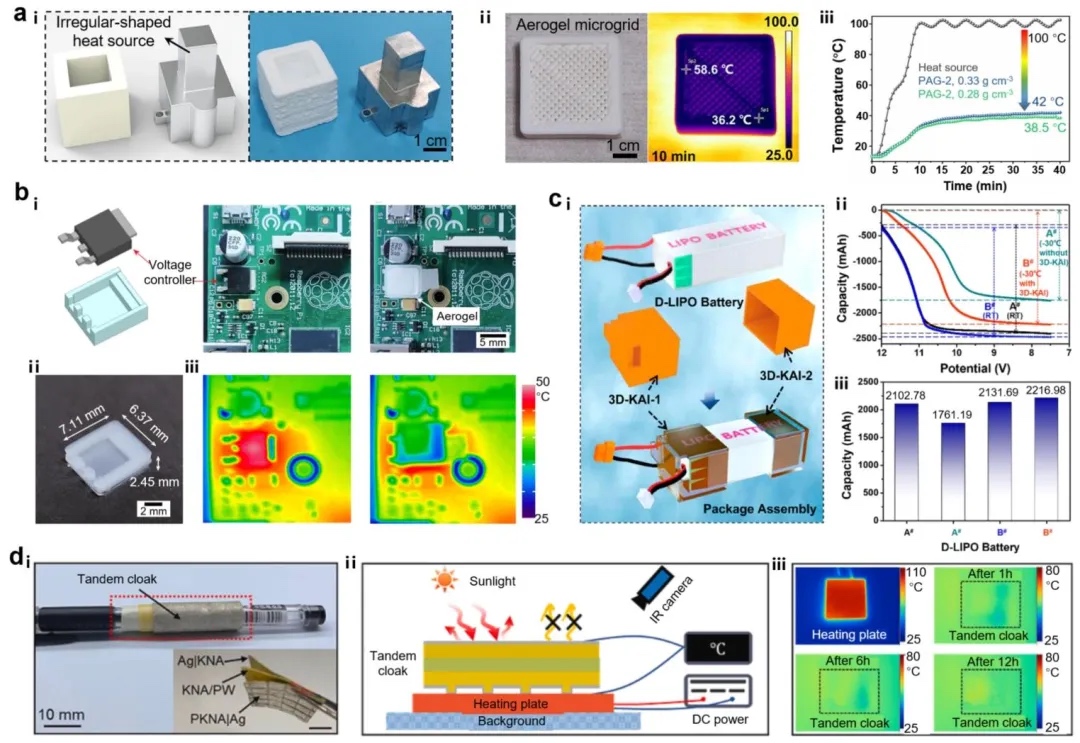
- 热管理:以3D打印的二氧化硅基和Kevlar基胶体气凝胶为例,研究其在热管理领域的应用,如作为隔热材料和用于红外隐身。结果表明它们能有效阻挡热量传递和控制红外辐射。
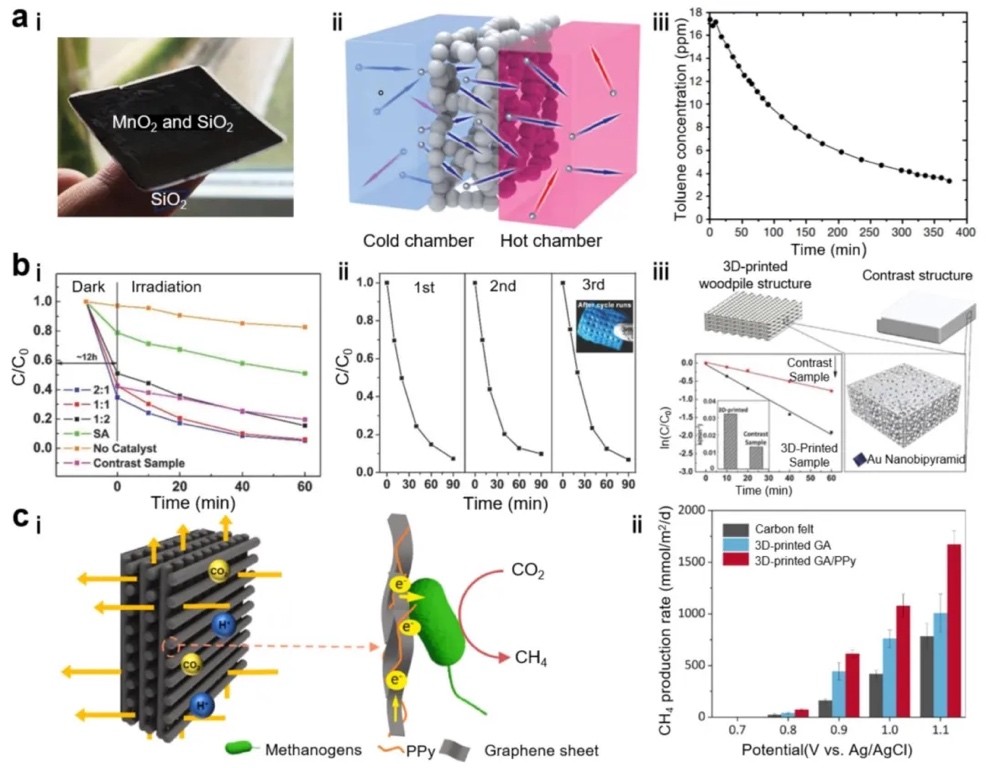
- 催化:通过实验研究,发现3D打印胶体气凝胶与功能材料结合可实现对有机化合物的光热催化降解、二氧化碳转化等。如3D打印的二氧化硅基双层胶体混合气凝胶可用于甲苯的光热催化降解。
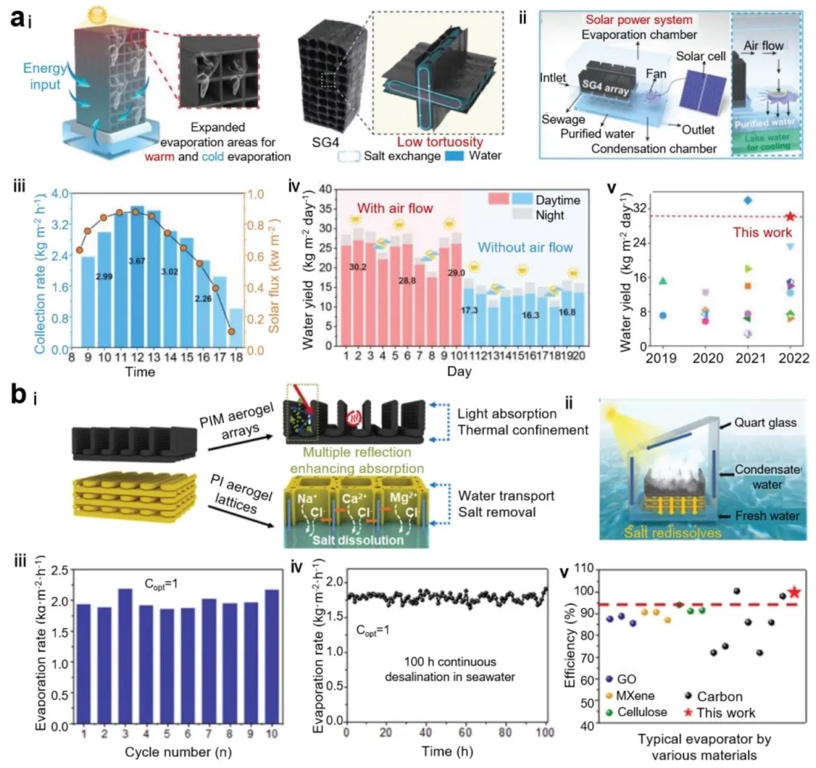
- 太阳能蒸汽蒸发:研究3D打印胶体气凝胶在太阳能蒸汽蒸发领域的应用,发现其多孔结构和光热转换性能可实现高效水蒸发和海水淡化。如3D打印的纤维素/藻酸盐/碳纳米粉末气凝胶和聚酰亚胺/MXene胶体气凝胶阵列在太阳能蒸发器中表现出色。
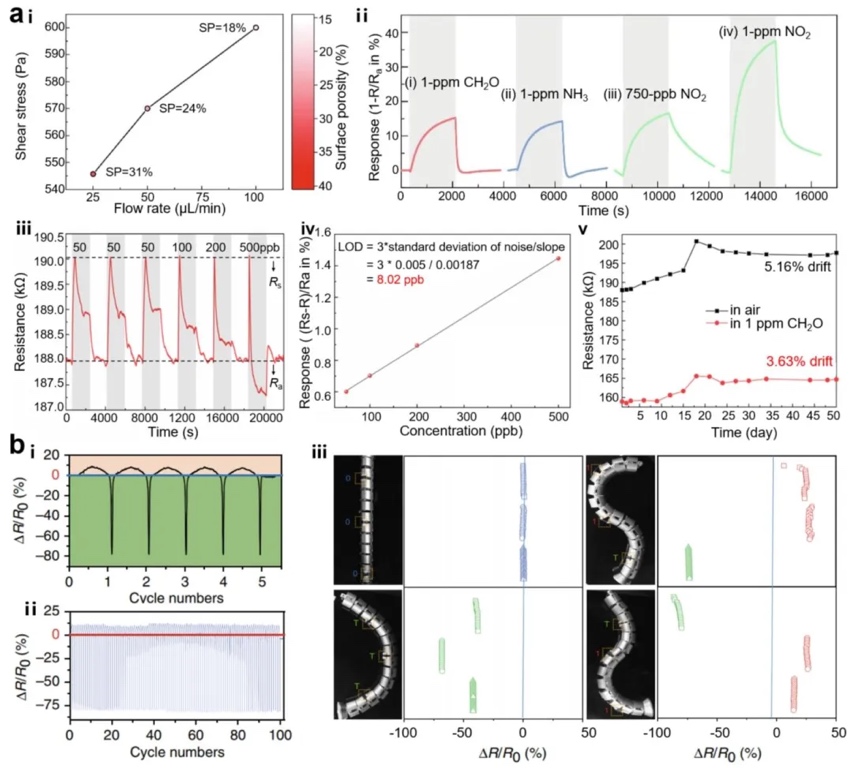
- 传感器和执行器:通过制备不同结构的气凝胶并测试其对外部刺激的响应性能,研究发现3D打印胶体气凝胶在传感器和执行器领域有应用潜力,如用于气体传感、应变传感等。
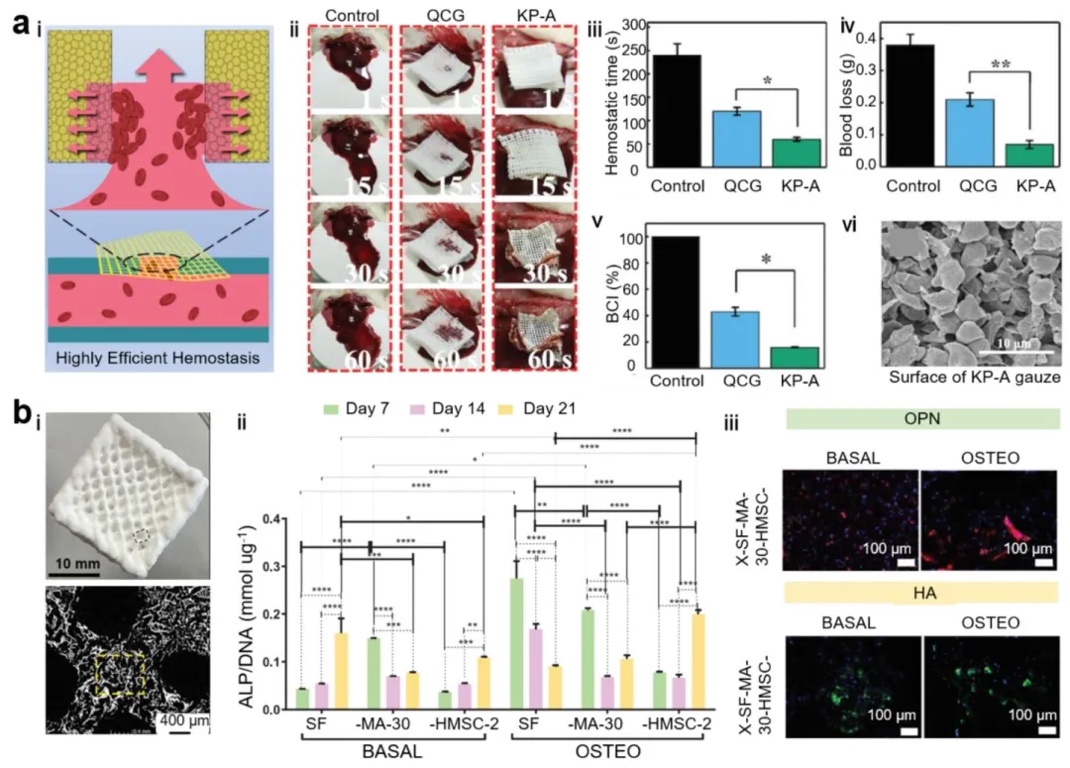
- 生物工程:以3D打印的Kevlar/PVA胶体气凝胶和丝素蛋白胶体气凝胶为例,通过体内动物实验和细胞培养实验,研究发现它们在生物工程领域有应用前景,如高效止血和促进骨组织再生。
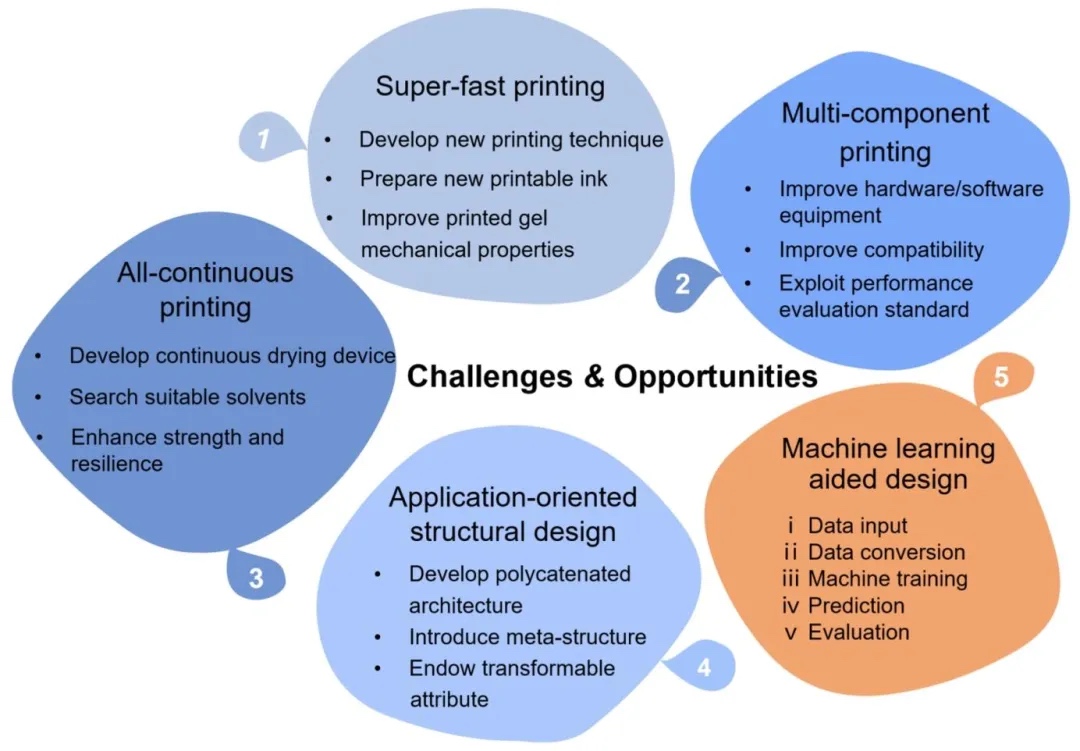
4. 3D打印胶体气凝胶的挑战与机遇
分析3D打印胶体气凝胶当前面临的挑战,包括超快速打印、多组分打印、全连续打印、面向应用的结构设计和机器学习辅助设计等方面。通过对现有技术和应用需求的研究,提出相应的解决方向和未来发展机遇。
文章来源:
https://doi.org/10.1016/j.pmatsci.2025.101456




0 留言